


歐美進口振蕩器規定的抖動類型
來源:http://www.11ed.cn 作者:金洛鑫電子 2018年09月21
業界里常說擁有低抖動特性的晶體振蕩器,都屬于特別高端的晶振,各位做石英晶振的同行大概都能明白這個意思,然而對于外行人來說,就有點難以理解了。美國和歐洲其他國家的進口晶振量產的低抖動晶振比較多,日系也只有愛普生晶振,NDK晶振,KDS晶振,京瓷晶振等品牌會有部分生產,但也不算多。歐美的石英晶體振蕩器抖動并不是都一樣,而是有多種類型,和不同的計算方式。
時域測量:
有源晶振周期到周期抖動測量相鄰周期之間的周期差。峰值到峰值周期抖動是寬度周期測量值從最小值到最大值的分布。從連續的直方圖獲得峰到峰邊緣測量。采集的樣本測量越多,最小和最大之間的差異越大期間數據點。樣本周期測量的分布具有與其相關的RMS或標準偏差(1-sigma)。周期測量分布的1-sigma電平可用于計算誤碼率。預期的BER定義為當峰值到峰值的總抖動(隨機加確定性)超過抖動預算時,導致誤碼的概率。
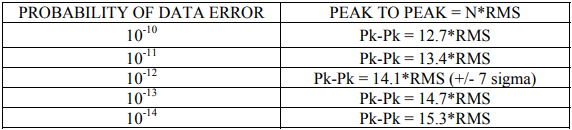
下面列出的是隨機抖動(pk-to-pk)與BER的關系表:
頻域測量:
可以從MtronPTI晶振的DTS時間測量系統獲得指定帶寬上的集成抖動。例如,SONET標準要求在與載波頻率偏移12KHz至20MHz的頻帶內的抖動性能。根據根據測量的樣本數量,Wavecrest系統將在每個單位30至90秒內計算該值。
集成抖動也可以在給定帶寬上從相位噪聲測量系統獲得。取決于數量在每個頻率偏移帶內的平均值,每單位測量可能需要長達四分鐘。每次測量技術有其優點和缺點。與MtronPTI技術支持的補充討論可以審查這些測量技術的差異更詳細。
在特定的155.52MHz PECL晶振產品中,集成抖動在12KHz至20MHz的頻帶內為1.08pS。在時域中測量,該相同的DUT具有5.99pS的循環到循環1-sigma水平。時域中的峰值到峰值是45.8pS。盡管集成相位抖動看起來更好,因為它的數量較小,但時域測量可以進行通信有關振蕩器波形噪聲特征的相同信息。
將相位噪聲數據轉換為集成相位抖動:
有許多論文描述了如何根據進口晶體振蕩器相位噪聲推導表達RMS抖動的方程。我們會告訴你什么是一個為Microsoft Excel電子表格開發的實際應用程序。這是一個可供任何工程師使用的工具有興趣分析相位噪聲數據。我們從完善的公式開始,以秒為單位計算RMS抖動相位噪聲。

fo=以Hz為單位的載波頻率
f1,f2=感興趣的偏移頻率范圍,單位為Hz
Φ=以弧度表示的相位噪聲2/Hz
dBc=相對于載波的相位噪聲功率
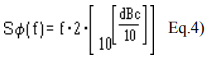
SΦ(f)=特定偏移頻率f的頻譜密度,單位為Hz,(見公式2)
Φ與等式3的相位噪聲功率有關。在方程式2中代入Φ,我們得到方程式4中SΦ(f)的最終定義。
為了近似積分,我們使用梯形等式5的總和。

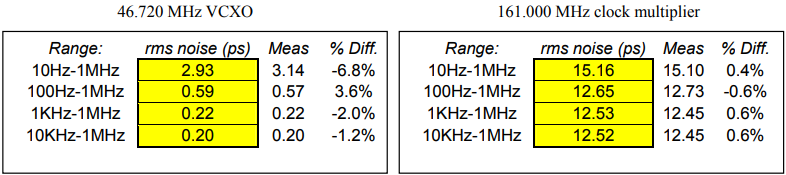
相位噪聲測試系統以對數標度繪制頻率,每十年應選擇至少3個點。例如獲得均勻間隔的點,我們選擇使用10,20,50,100,200 ......等方法。更多的點等于更好的相關性。剩下的就是取總和的平方根,然后除以(2*PI*Fo)。我們已經描述了所有必要的部分使這成為一個簡單的任務,實現到電子表格或將其編碼為BASIC或C程序。
下面列出的結果將此方法與使用n=16點的Aeroflex PN9000相位噪聲測試裝置進行比較10Hz至1MHz。
從供應商到客戶的振蕩器抖動的相關性:
無論指定何種類型的抖動,最大石英晶體振蕩器抖動水平都會導致最終產品失效要求應該確定。在大多數情況下,振蕩器抖動對整個系統抖動的貢獻為25%或更低。幫助振蕩器公司模擬客戶板上的操作,有關噪聲波動的信息應該是振蕩器電源給供應商。然后,可以在有和沒有電源線噪聲注入的情況下執行抖動測量客戶可以更好地理解設備如何通過一些“板載”信號干擾來執行。
MtronPTI晶振建議其客戶群:
1)使用50000個周期循環指定時域1-sigma抖動和峰峰值電平。
2)還應指定SONET帶寬(12 KHz至20 MHz)上的集成相位抖動。
3)應規定不同頻率偏移下的相位噪聲性能,以便為振蕩器供應商提供完整的圖像
振蕩器信號噪聲分布。
時域測量:
有源晶振周期到周期抖動測量相鄰周期之間的周期差。峰值到峰值周期抖動是寬度周期測量值從最小值到最大值的分布。從連續的直方圖獲得峰到峰邊緣測量。采集的樣本測量越多,最小和最大之間的差異越大期間數據點。樣本周期測量的分布具有與其相關的RMS或標準偏差(1-sigma)。周期測量分布的1-sigma電平可用于計算誤碼率。預期的BER定義為當峰值到峰值的總抖動(隨機加確定性)超過抖動預算時,導致誤碼的概率。
下面列出的是隨機抖動(pk-to-pk)與BER的關系表:
頻域測量:
可以從MtronPTI晶振的DTS時間測量系統獲得指定帶寬上的集成抖動。例如,SONET標準要求在與載波頻率偏移12KHz至20MHz的頻帶內的抖動性能。根據根據測量的樣本數量,Wavecrest系統將在每個單位30至90秒內計算該值。
集成抖動也可以在給定帶寬上從相位噪聲測量系統獲得。取決于數量在每個頻率偏移帶內的平均值,每單位測量可能需要長達四分鐘。每次測量技術有其優點和缺點。與MtronPTI技術支持的補充討論可以審查這些測量技術的差異更詳細。
在特定的155.52MHz PECL晶振產品中,集成抖動在12KHz至20MHz的頻帶內為1.08pS。在時域中測量,該相同的DUT具有5.99pS的循環到循環1-sigma水平。時域中的峰值到峰值是45.8pS。盡管集成相位抖動看起來更好,因為它的數量較小,但時域測量可以進行通信有關振蕩器波形噪聲特征的相同信息。
將相位噪聲數據轉換為集成相位抖動:
有許多論文描述了如何根據進口晶體振蕩器相位噪聲推導表達RMS抖動的方程。我們會告訴你什么是一個為Microsoft Excel電子表格開發的實際應用程序。這是一個可供任何工程師使用的工具有興趣分析相位噪聲數據。我們從完善的公式開始,以秒為單位計算RMS抖動相位噪聲。
fo=以Hz為單位的載波頻率
f1,f2=感興趣的偏移頻率范圍,單位為Hz
Φ=以弧度表示的相位噪聲2/Hz
dBc=相對于載波的相位噪聲功率
SΦ(f)=特定偏移頻率f的頻譜密度,單位為Hz,(見公式2)
Φ與等式3的相位噪聲功率有關。在方程式2中代入Φ,我們得到方程式4中SΦ(f)的最終定義。
為了近似積分,我們使用梯形等式5的總和。
相位噪聲測試系統以對數標度繪制頻率,每十年應選擇至少3個點。例如獲得均勻間隔的點,我們選擇使用10,20,50,100,200 ......等方法。更多的點等于更好的相關性。剩下的就是取總和的平方根,然后除以(2*PI*Fo)。我們已經描述了所有必要的部分使這成為一個簡單的任務,實現到電子表格或將其編碼為BASIC或C程序。
下面列出的結果將此方法與使用n=16點的Aeroflex PN9000相位噪聲測試裝置進行比較10Hz至1MHz。
從供應商到客戶的振蕩器抖動的相關性:
無論指定何種類型的抖動,最大石英晶體振蕩器抖動水平都會導致最終產品失效要求應該確定。在大多數情況下,振蕩器抖動對整個系統抖動的貢獻為25%或更低。幫助振蕩器公司模擬客戶板上的操作,有關噪聲波動的信息應該是振蕩器電源給供應商。然后,可以在有和沒有電源線噪聲注入的情況下執行抖動測量客戶可以更好地理解設備如何通過一些“板載”信號干擾來執行。
MtronPTI晶振建議其客戶群:
1)使用50000個周期循環指定時域1-sigma抖動和峰峰值電平。
2)還應指定SONET帶寬(12 KHz至20 MHz)上的集成相位抖動。
3)應規定不同頻率偏移下的相位噪聲性能,以便為振蕩器供應商提供完整的圖像
振蕩器信號噪聲分布。
正在載入評論數據...
相關資訊
- [2024-03-08]IQD晶體尺寸縮小的設計效果LFXT...
- [2024-03-07]Golledge衛星通信中的頻率控制產...
- [2024-03-07]Golledge工業自動化和控制系統中...
- [2024-03-06]MTI-milliren恒溫晶振222系列振...
- [2024-03-06]MTI-milliren低G靈敏度銫原子鐘...
- [2024-03-05]GEYER高穩定性KXO-V93T低功耗32...
- [2024-03-02]NEL為系統關鍵應用程序設計和制...
- [2024-01-06]溫補補償振蕩器的原理及特點
 業務經理
業務經理 客服經理
客服經理
